
Лабораторная работа № 3
A параметры не изменяются; B параметры изменяются в результате управляющих и возмущающих воздействий; C параметры изменяются только в результате возмущающих воздействий; D параметры не зависят от воздействий; E параметры изменяются случайно. A генерация энергия скольжения; B превращение энергии скольжения в тепловую; C изменение частоты питающего напряжения; D ничего не происходит; E превращение энергии скольжения в механическую. A асинхронный электродвигатель; Д согласующий трансформатор; B инвертор; E выпрямитель. C фильтр;.






 | Контент-платформа zakaz-kalyany.ru")








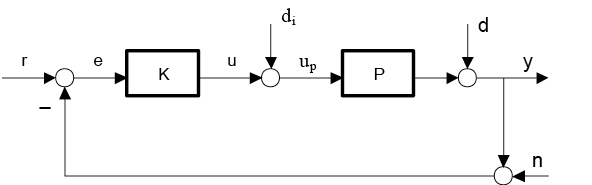
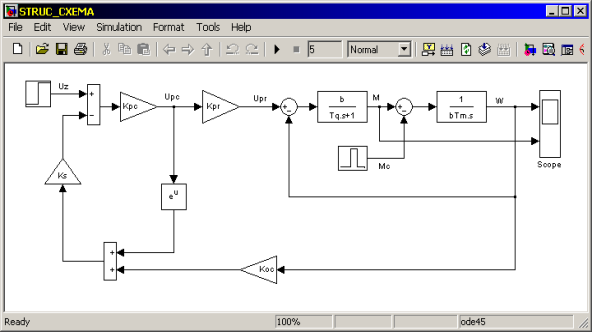
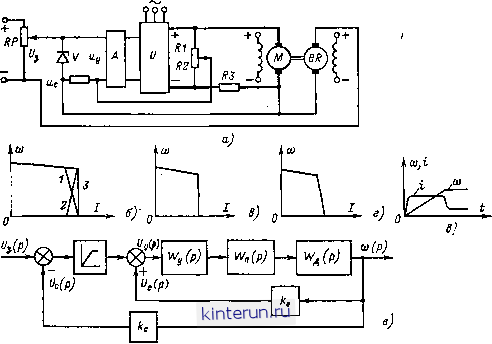
В ранее рассмотренных разомкнутых системах ТП-Д из-за влияния R n характеристики имеют невысокую жесткость и не обеспечивается ограничение тока и момента. Поэтому широко применяются замкнутые системы регулирования скорости, тока и момента с помощью обратных связей [5]. Система представлена на рис.

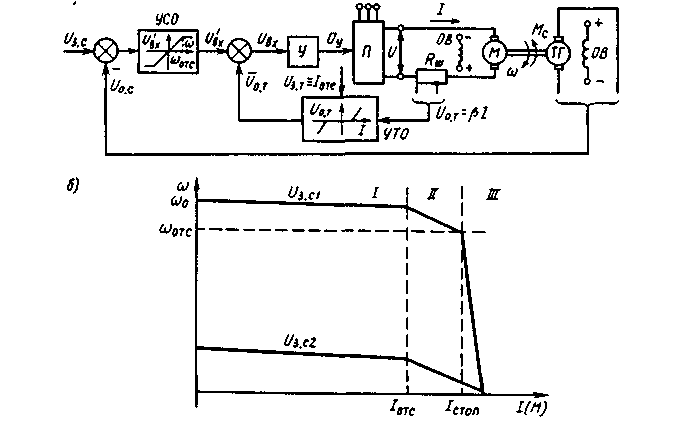

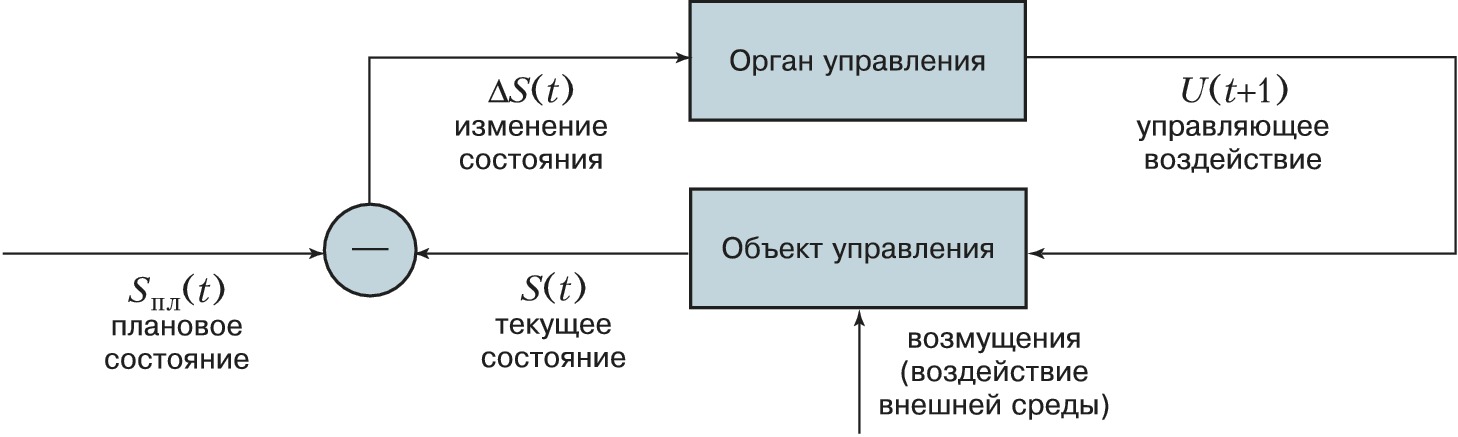

Характеристики разомкнутых электроприводов, построенных по системе «преобразователь — двигатель» П-Д , могут имеют относительно невысокую жесткость из-за наличия внутреннего сопротивления преобразователя и самого двигателя. Для получения значительных диапазонов и высокой точности регулирования скорости требуется иметь более жесткие характеристики, которые можно подучить лишь в замкнутой системе П-Д. Кроме того, характеристики разомкнутой системы не обеспечивают точного регулирования или ограничения тока и момента, что также требует перехода к замкнутой системе П-Д. Рассмотрим принципы построения и действия замкнутых схем регулирования скорости, тока, момента и положения с использованием различных обратных связей.






Похожие статьи
- Не падают обороты двигателя на ваз 2112
- Как связать шапку шарф спицами видео - Вяжем спицами шапку и шарф Видео на Запорожском портале
- Узоры для вязания спицами снуда видео - Как связать модный шарф-хомут или шарф-снуд спицами фото
- Как связать шапку-носок спицами схема - Детская шапка спицами: вязание шапки с ушками